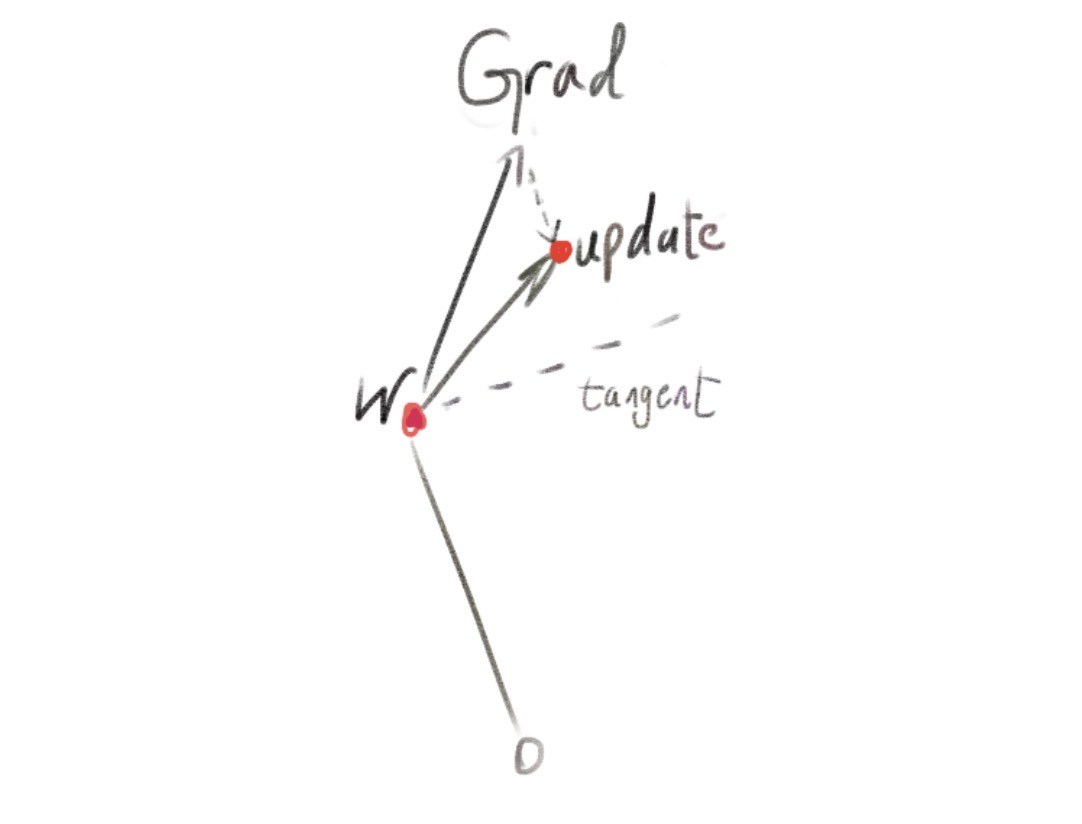
Radial Brake
Radial brake dampens the radial component of the update vector, in my experiments by a factor OUTWARD_SCALE_FACTOR = 0.5.
Simplest definition
The cleanest definition is as follows. Apply the usual gradient update w := w_prev + dw to the weights. Then re-scale w to w_brake such that
||w_brake|| = ||w_prev|| + OUTWARD_SCALE_FACTOR * (||w||-||w_prev||),
if ||w||>||w_prev||. Wtherwise OUTWARD_SCALE_FACTOR is replaced by INWARD_SCALE_FACTOR.
The procedure is related to AdamP (roughly OUTWARD_SCALE_FACTOR = 0) and hyperball, roughly (OUTWARD_SCALE_FACTOR = INWARD_SCALE_FACTOR = 0).
The left picture below shows the direct norm-rescale definition described above. The initial experiment used a decomposition of the gradient like in the picture on the right. This was followed by a correction to adjust for outward drift of tangential movement (see the PR for details). I believe the simpler definition on the left captures essentially the same behavior, although there is a 2nd order difference between the 2 definitions.
| Clean norm-rescale definition | First-order radial update view |
|---|---|
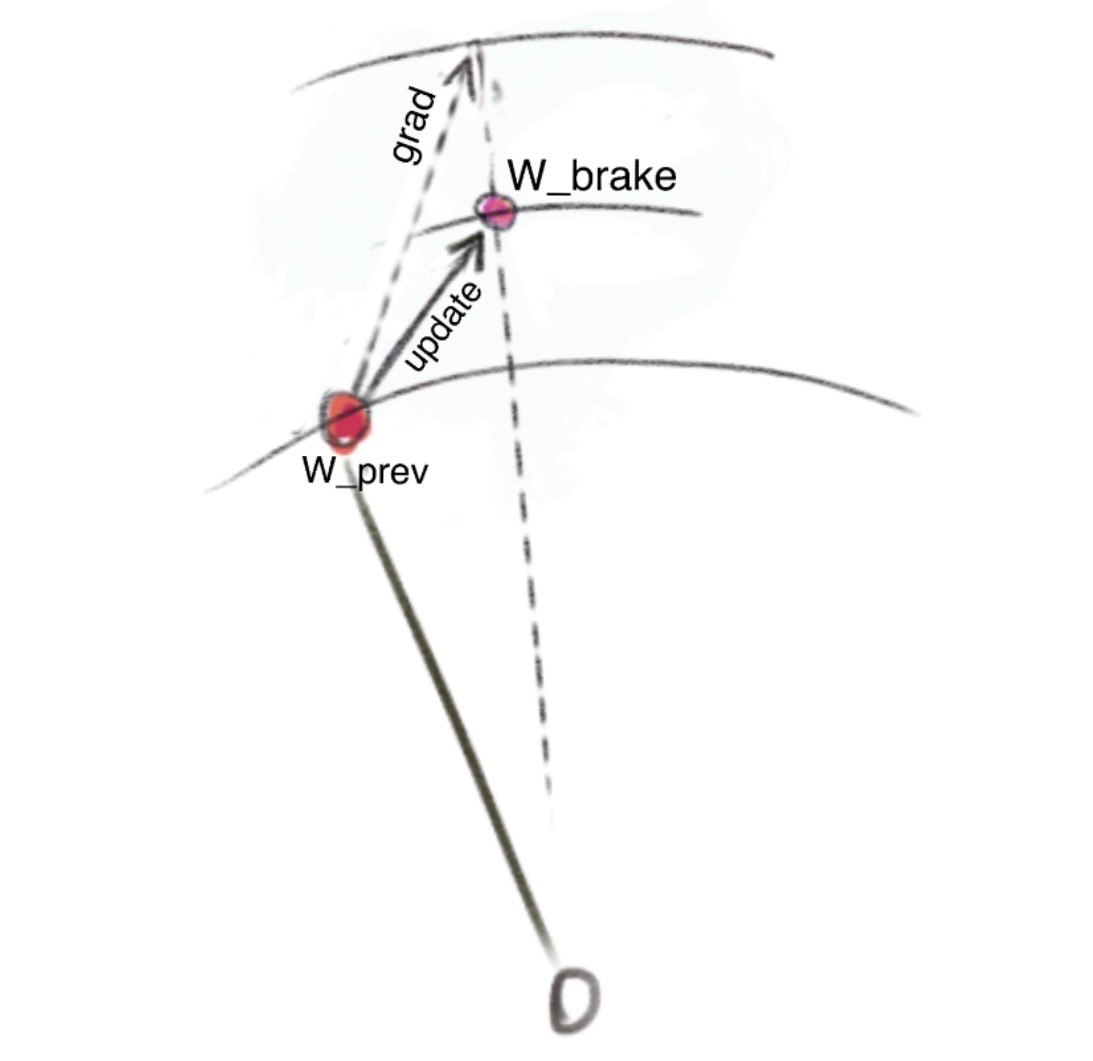 |
 |
Experimental Setting
The plots below are based on PrimeIntellect’s 2930-step autoresearch record PR300 from the modded nanogpt track 3. This record inherits from my 2990-step record PR294 where I introduced the radial brake. The implementation in these experiments differs slightly but agrees to first order and should not give materially different results.
Weight Norms
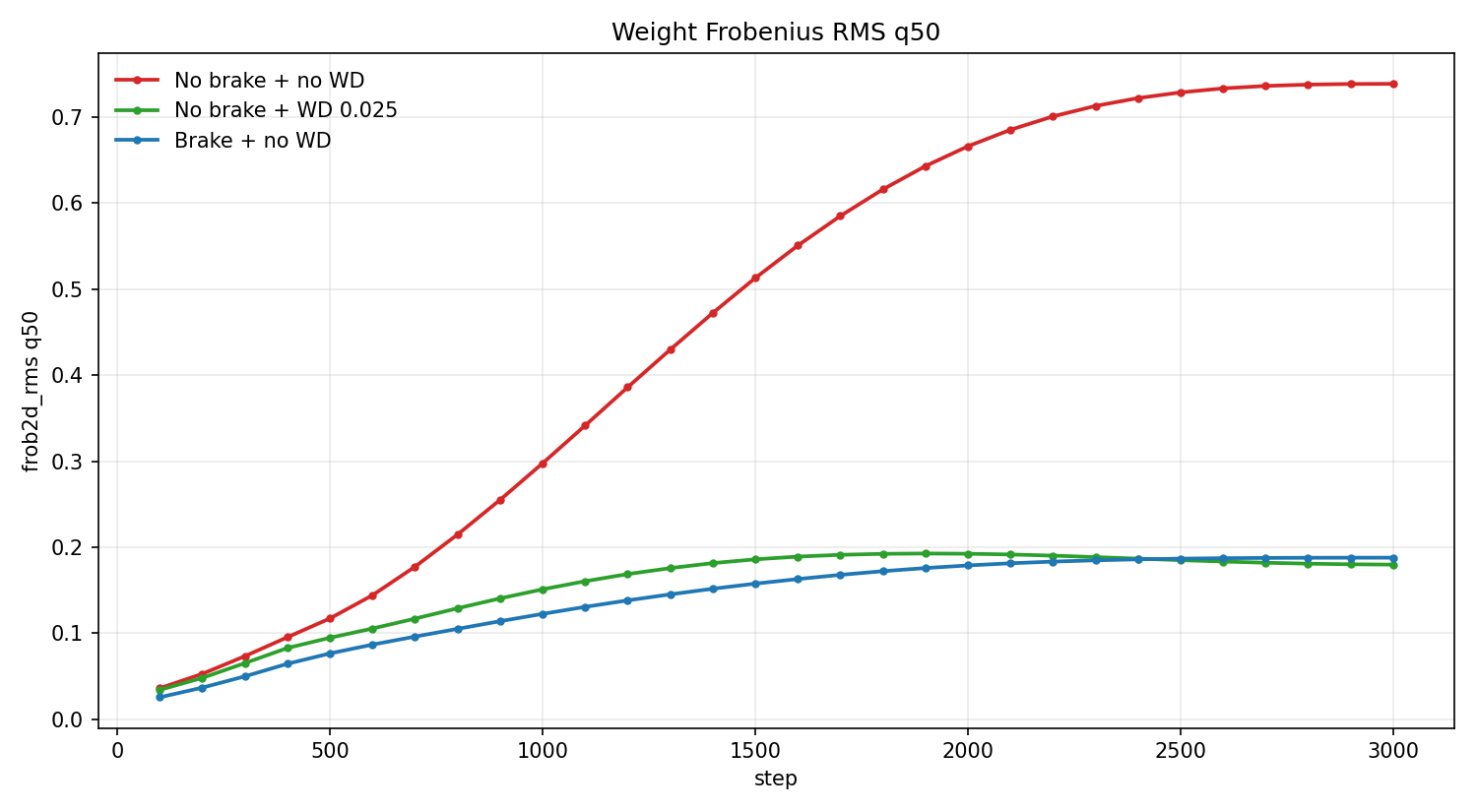
Median per-tensor dimension-normalized Frobenius RMS.
Condition number proxy
We use a robust proxy for the condition number based on the Schatten 4-norm/2-norm. The Schatten 4-norm estimates works as a rough proxy for the operator norm, and the 2-norm can be viewed as an average of singular values, which is a more robust alternative to the smallest singular value.
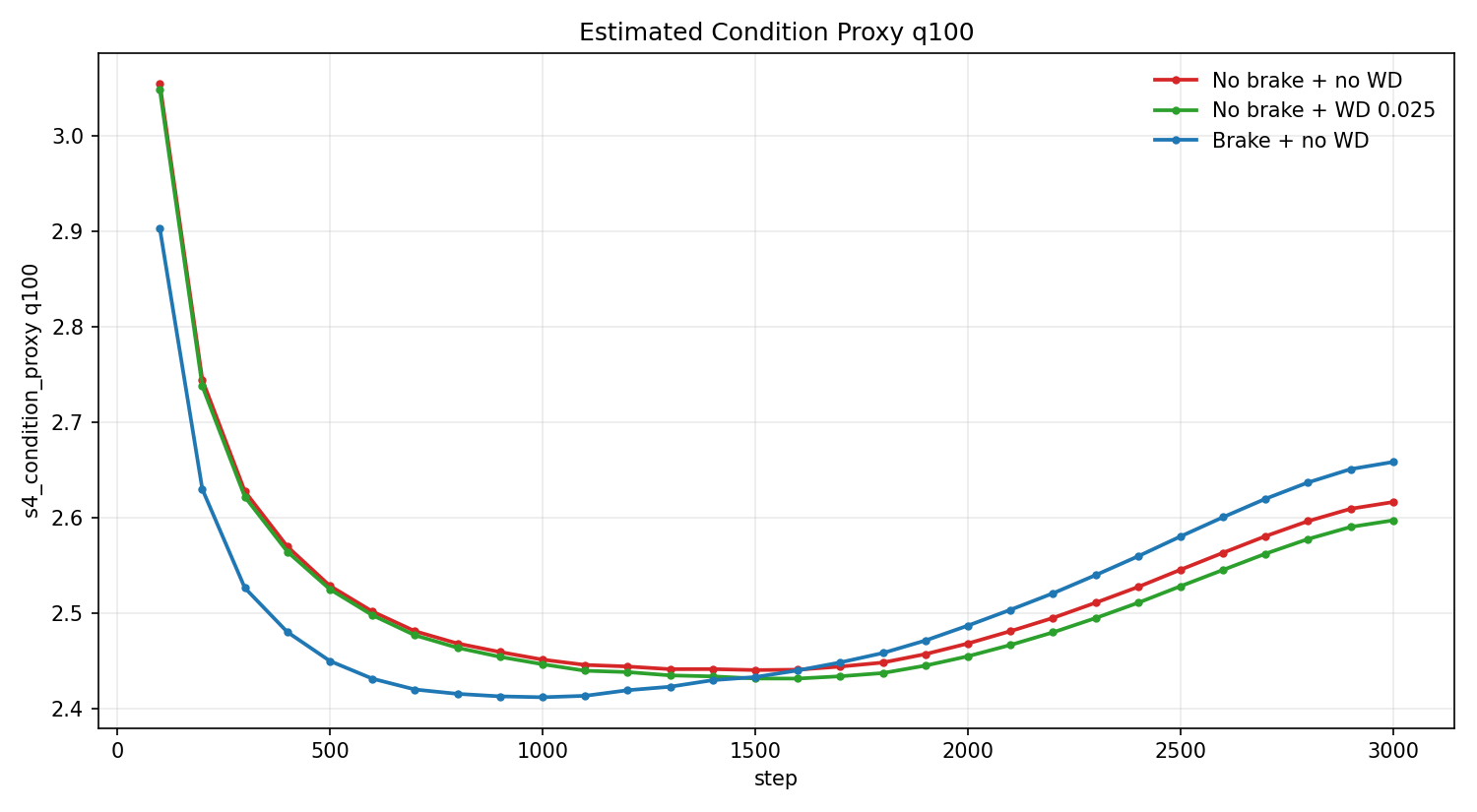
Maximum estimated condition number proxy based on the logged Schatten-4-style statistic (Schatten 4-norm/2-norm).
Late Validation Loss
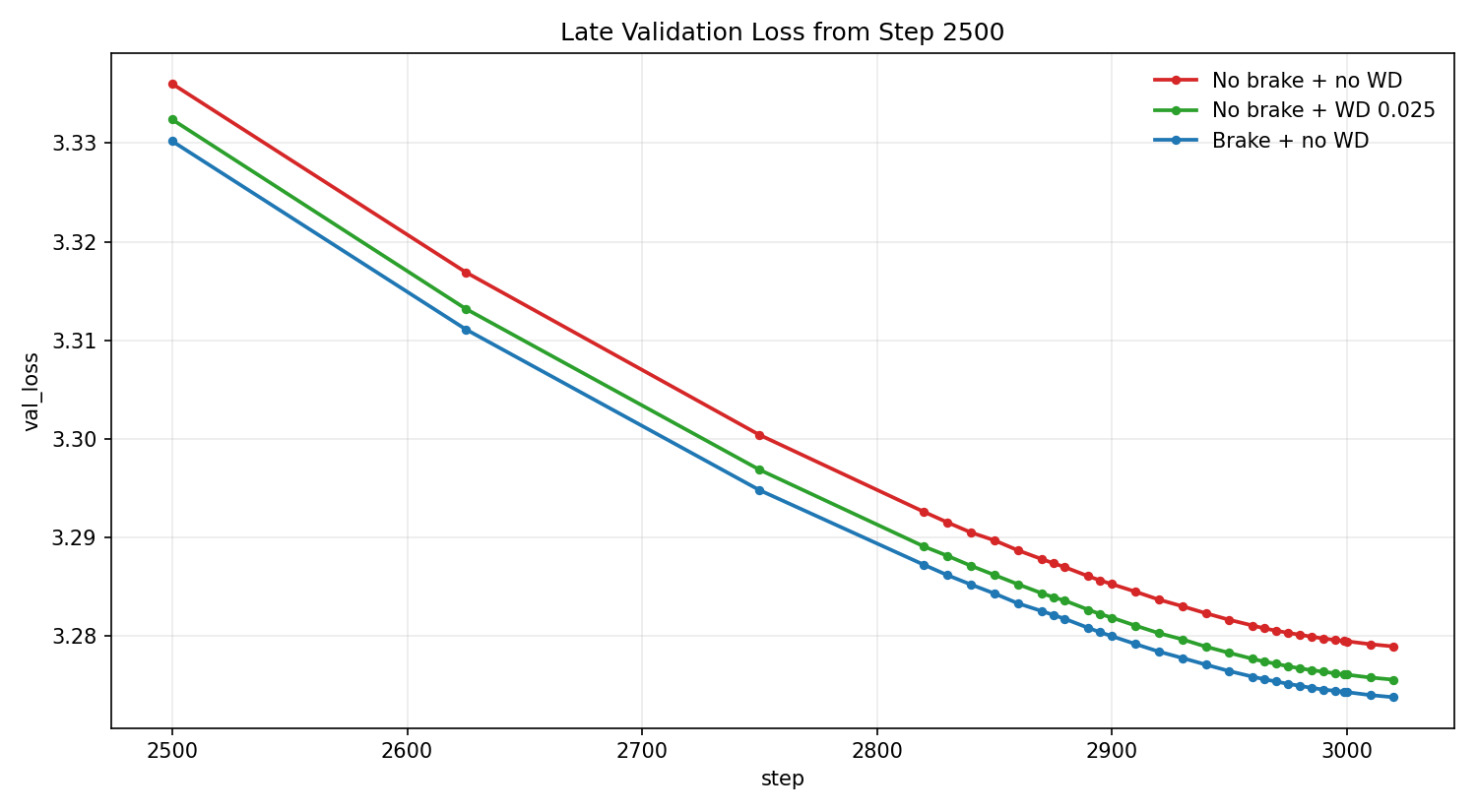
Validation loss from step 2500 onward.